水电站水坝如何快速监测裂纹?拉西瓦水电站ROV水下机器人巡检案例







案例背景:
拉西瓦水电站位于青海省境内的黄河干流上,是黄河上游龙羊峡至青铜峡河段规划的第二座大型梯级电站。拉西瓦水电站是黄河上最大的水电站和清洁能源基地,也是黄河流域大坝最高、装机容量最大、发电量最多的水电站。
电站的枢纽建筑物由双曲薄拱坝、坝身泄洪建筑物、坝后消能建筑物和右岸全地下厂房组成。其中坝后消能建筑物(水垫塘)是一种消能工程,当挑跌水流到位于下游的水垫塘以后,可以避免对河床底部产生比较大的机械能,破坏河床的底部,保护大坝及机组的安全运行。
拉西瓦水电站水垫塘为钢筋混凝土反拱形水垫塘,全长219.6m,圆弧内半径60m,中心角73.74°,拱肩处宽72m,反拱最低点高程2215.0m。
2019年5月拉西瓦水电站水垫塘表面进行了修补,为了解水垫塘长期泄洪后的冲蚀情况,检验水垫塘表面修补区域情况,搜寻安全隐患,本次使用潜鲛P100对水垫塘的水下部分进行表面巡检。

时间:
2020年6月8日—2020年6月9日
地点:
青海省海南藏族自治州贵德县拉西瓦镇
现场情况说明:
拉西瓦电站在检测时已关闭出水口,并且由于二道坝的拦水作用,水垫塘整体水流平缓,基本处于静水状态,能见度大约0.5米,水深20-30米。
巡检准备:
1)人员准备
测绘工程师5名 ; 水下机器人操纵工程师1名
2)仪器设备
潜鲛P100水下无人机(选配200wh电池,200米线缆) ; 大功率水下补光灯 ; 手机和平板(均为Android系统)
巡检方案:

(1)在二道坝上每10米标记位置,分别在5米、15米、25米、35米、45米、55米、65米、75米等8个位置点为8道检测段面的起点,并依次命名为一段、二段、三段......八段(如图所示);
(2)先从5米检测段面开始,每个段面开始录像的时间,检测录制完毕后结束录像并记录时间,即为记录该段面的检测视频;
(3)潜鲛P100在每个段面的位置点入水,潜航器镜头对着二道坝下潜并开始录制视频,下潜至二道坝底后开始穿过水垫塘底部直到坝体平台和水垫塘底板交界处后,潜航器上浮并检测坝体平台垂直面至溢流坎肩位置处,整个段面检测长度约200米;
(4)提交一共8道检测段面的水下视频影像。

水垫堂巡检过程展示
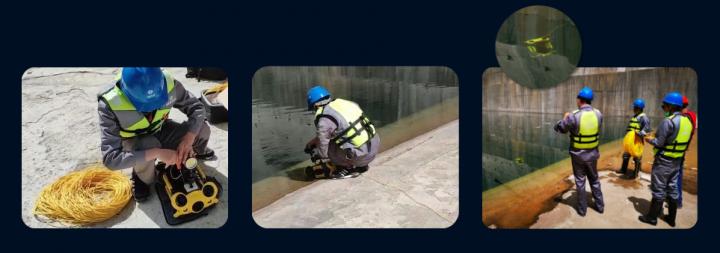
1、潜鲛P100机器连接组装其中为保证更长的作业续航时间,本次巡检在潜航器上额外搭载外置LED补光灯,以及将电池拆卸更换为200瓦时电池
2、根据方案,标记二道坝起航巡检位置点,并准备下水作业
3、执行巡检方案(潜鲛P100采用8推进器全矢量布局、360°全方位移动的高机动性配置,可精准实现任意角度的高清拍摄,不错漏细节。)

巡检结果分析:
A:
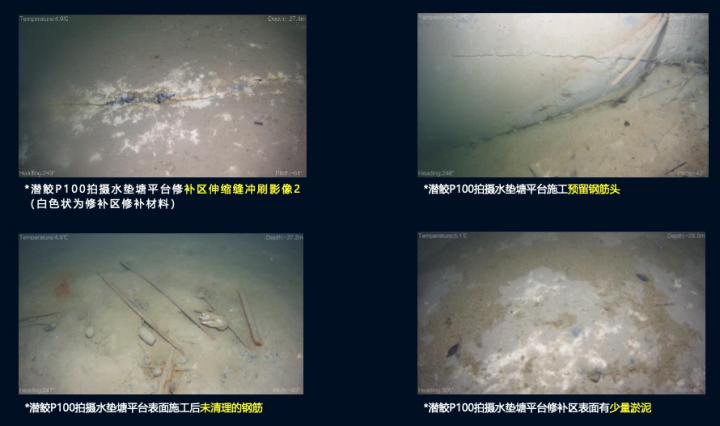
潜鲛P100拍摄到水垫塘底部发现修补少量凹痕,少量浅表冲刷、缝隙、钢筋和少量淤积物,水垫塘底板和边墙有少量的泥沙和杂物淤积,均无明显质量缺陷。

B:
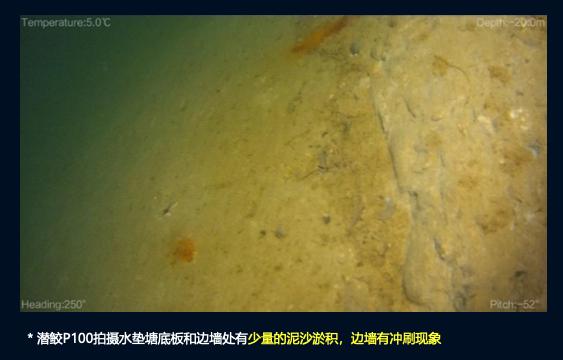
潜鲛P100拍摄到水垫塘底板和边墙处有少量泥沙淤积,边墙有冲刷现象,无明显缺陷。
C:
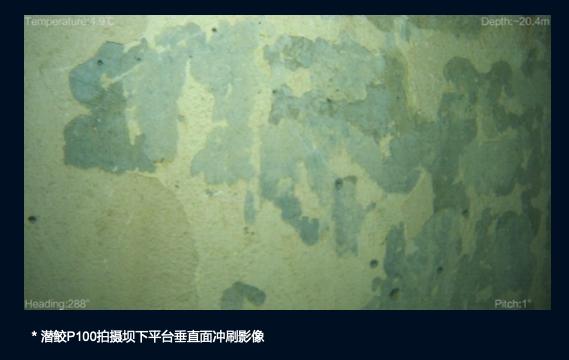
潜鲛P100拍摄到坝下平台垂直面混凝土少量浅表冲刷脱落,无明显问题。
D:
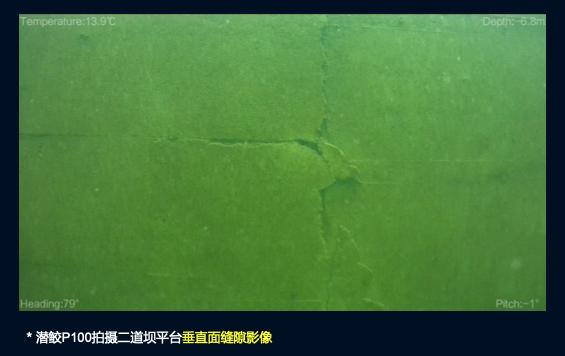
根据机器影像显示:潜鲛P100拍摄到二道坝垂直面混凝土有少量缝隙,该缝隙点位于第五检测段面的-6.8米深处,已记录在案,等待修补。
E:
根据机器影像显示:潜鲛P100拍摄到坝下平台和水垫塘平台交接处冲刷缝隙明显,该缝隙点位于第七检测段面的-23.2米深处,已记录在案,等待修补。

巡检结论:

潜鲛P100顺利完成本次水垫塘修补区水下影像的录制任务,包括检水垫塘底板修补区质量缺陷情况,对存在露筋、冲坑的区域近距离的录像。
本次水下视频影像分析结果与水下地形图、水下多波束声呐扫描影像结果基本一致,可确定目前水垫塘的具体情况,并作出相关决策——对水垫塘底部的浅表冲刷区可暂不修补,对部分严重的交接冲刷缝隙安排合适时期补修。
建议定期对水垫塘进行水下质量检测,掌握水垫塘受高速水流冲刷情况,视水毁具体情况,选择适宜的时期进行缺陷修补。

1、传统巡检主要为潜水员或租赁大型ROV水下机器人巡检,人工巡检安全隐患大,大型ROV租赁费用高,对于长期高频的巡检任务而言成本过高,而且机器比较笨重,拍摄效果差;潜鲛P100为轻工业级小体型水下机器人,安全经济易操控,提升工作效率与安全性;
2、潜鲛P100配置4K防抖镜头,为水下巡检提供清晰的影像资料,可辅助地形声纳测绘的结果更准确地分析;
3、用户对岩体某个段面观察的时候需要让机器保持平稳的左右横移或者在±90°移动观察,潜鲛P100为8推全矢量布局设计,可实现任一姿态的定深拍摄观察。
4、潜鲛P100为平台化设计,支持多种挂载,本次坝体巡检中挂载外置LED灯、激光卡尺,显著提升作业效率。
5、潜鲛P100可选配200瓦时电池并支持电池拆卸更换,拓展作业时间。
文章源自:MAKE1创一智慧网-物联网智慧解决方案
产品购买:ROV水下机器人-水利水电机器人系统